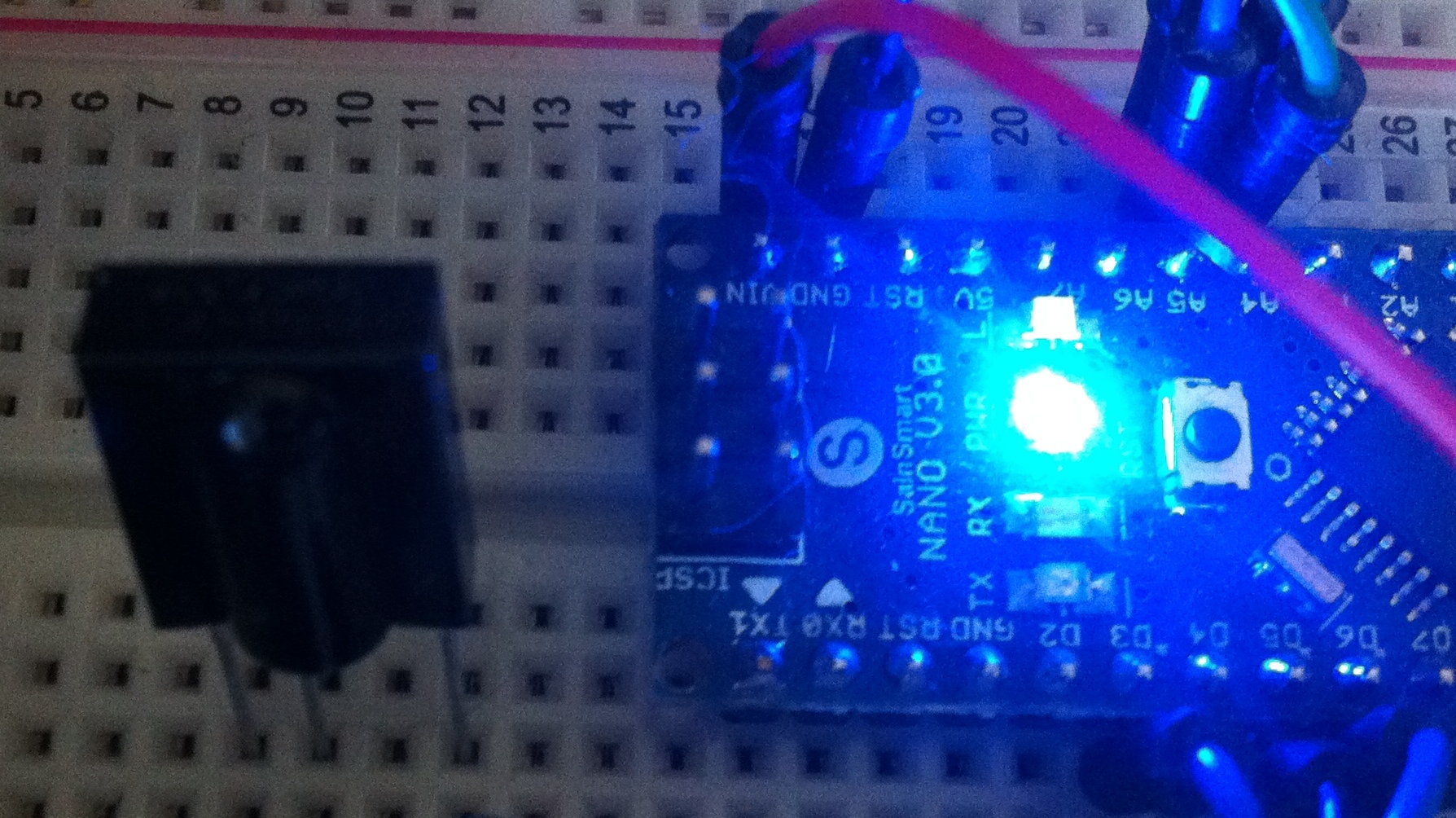
 Da ich ja nicht soooo oft Neuigkeiten poste, erlaube ich mir jetzt einfach mal ein klein wenig öfter zu schreiben. Ich bin immer noch bei meinen neuen Sensoren. Bisher konnten die Sensoren vom Master zum leuchten und blinken gebracht werden.
Da ich ja nicht soooo oft Neuigkeiten poste, erlaube ich mir jetzt einfach mal ein klein wenig öfter zu schreiben. Ich bin immer noch bei meinen neuen Sensoren. Bisher konnten die Sensoren vom Master zum leuchten und blinken gebracht werden.
Wofür das eigentlich?
Als erstes um dem Angreifer einen Treffer zu signalisieren. Schadenstreffer werden grundsätzlich in rot dargestellt.
Warum dann eine RGB-LED in den neuen Sensoren?
Neben Rot als Signalfarbe, wird es auch Grün geben, um empfangende Heilung anzuzeigen. Außerdem möchte ich das System sehr anpassbar gestalten. Das bedeutet, dass jeder Spieler, wie in Laser Domes üblich, in eigenen Teamfarben leuchten kann. Wenn man das nicht möchte, können Teamfarben eben einfach deaktiviert werden.
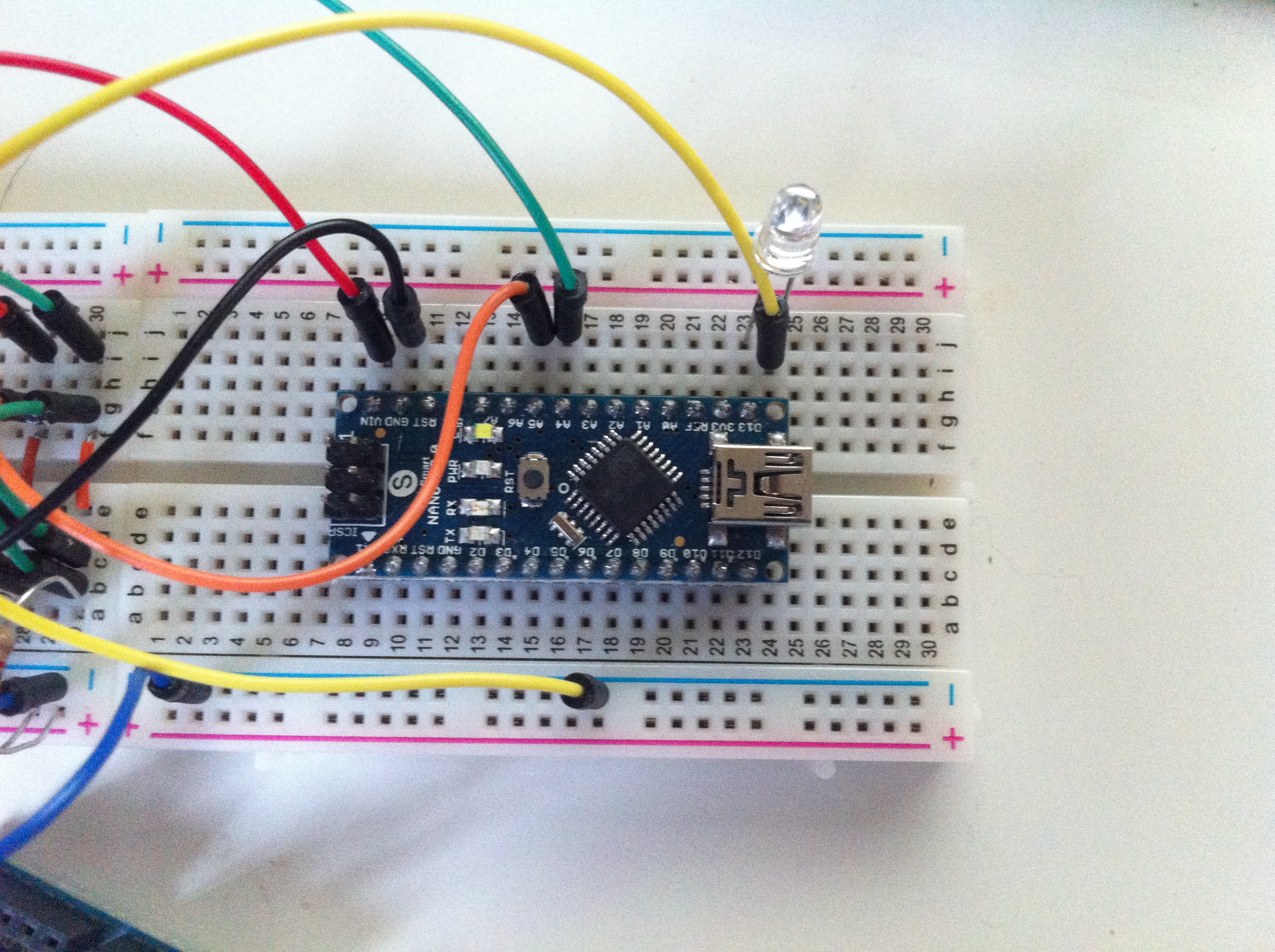
IR-Empfang
Ich habe nun die Funktionen für den Empfang der 2 Bytes + Prüfbit eingebaut. Der Sensor empfängt nun zuverlässig das Signal, und prüft es auf Korrektheit. Fehlerhafte oder nur teilweise empfangene Signale werden ignoriert. Sollte das Signal in Ordnung sein, leitet der Sensor die Daten (2 Bytes ohne Prüfbit, weil verifiziert ist das Signal bereits im Sensor) zusammen mit seiner eigenen SensorID an den Master. Im Master werden die Daten dann ausgewertet und entschieden, wie die Sensoren blinken müssen. Das Mitsenden der eigenen SensorID ist dafür nötig, um auswerten zu können, von wo der Schuss registriert wurde. Jede SensorID ist theoretisch mit einer Position am Körper logisch verknüpft.
Kurz und knapp: ES GEHT!!
Kleiner Nachtrag zu meinem Blogpost von gestern:
Kurz nachdem ich den Beitrag verfasst hatte, habe ich eine E-Mail mit einem angehängten Foto vom Hersteller bekommen, welches die Platinen kurz vor dem Versand zeigt.

Gnihihihihi …. jetzt 3 Wochen warten…. Gnaahhh